
圖1 雲臺框架
1、主控單元:
主要完成完成三個事情:
(1)電機控制。讀取姿態感測器信號確定雲臺當前姿態,即採樣定子電流電流,先後經過Clark,Park運算,PI運算計算需要調整的參數,經過Clark,Park逆運算,轉化輸出為勵磁電流,然後與轉速環相比較,控制輸出PWM,從而控制電機,MCU需要完成FOC速度控制模式演算法,PID演算法。
(2)無線數據交互。MCU需要通過藍牙鏈接手機等平臺攝像設備,控制拍照,完成人機交互。
(3)協調控制雲臺系統。
GD32F4XX系列MCU,200Mhz主頻,3MB Flash 256K Ram,同時自帶硬體FPU,對於需要較大RAM的處理FOC,PID演算法的電機控制系統很具優勢,同時具備電機控制的高級定時器,正交編碼器介面,霍爾感測器介面,可以採集電機速度,位置,以及電流形成閉環控制,可編程PWM模式,可以靈活控制三相電機實現電機快速實現回應。
2、電機驅動
電機驅動:可以採用集成驅動IC或者分立MOS自行搭建集:
集成IC:控制簡單,集成度更高,IC自帶欠壓保護,短路保護,死區控制,但是由於MOS內部集成,散熱差,驅動能力一般。
分立驅動方案:集成度較低,分立MOS一般具有較大電流,散熱好,驅動能力較好,MCU一般在輸出PWM時自帶死區控制,但是在短路,過熱,欠壓等狀態提醒略顯不足
目前在我司代理的MPS產品線,有成熟的電機驅動晶片,該晶片針對各種負載條件做了死區時間、對稱性能優化,且內部MOSFET設置5.5A電流限制,超過該極限時,過流橋將進入高位阻抗狀態,若晶片溫度超過160℃,所有內部開關將關閉,防止過熱損壞。
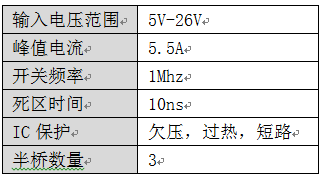
表一 電機驅動參數
3、電源
手持雲臺內部為鋰電池直接供電, 需要充電管理晶片,BUCK,BOOST,LDO等諸多電源IC,電源分支可以分為->3.3V MCU分支,->24 電機驅動分支 ->其他週邊分支。這裏不一一列出,如果有需要可以直接和ZLG銷售人員聯繫我們將為您定制完整的電源解決方案。
4、無線傳輸
手持雲臺目前主流的無線方式TRP是BLE,相比傳統的線控,無線更方便快捷,且每部手機都配有藍牙功能,後續隨著雲臺功能形態的轉變,需要更高的數據帶寬,以及更遠的傳輸記錄,WiFi不失為一種更好的選擇。目前為大家推薦我司代理的兩顆BLE晶片:
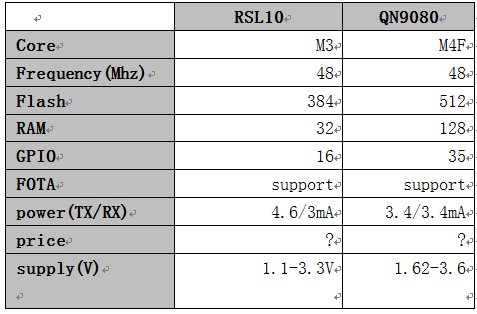
表二 藍牙晶片參數
如表二所示。兩顆IC均為BLE5.0,相比BLE4.0/2,功耗更低,且支持FOTA功能,對於手持設備,續航時間將更久,相比於其他藍牙SOC,RSL10的電壓範圍更廣,對於鋰電池供電的手持雲臺,電能利用率更高。










